A cura di Ivano Magnifico, Product Manager AUTOMA
Dall’intervento “Back to the future: quando il passato è già il futuro”
SMART GRID DAYS 2025, 8 – 9 ottobre 2025.
Stiamo utilizzando come dovremmo i dati che riceviamo dai sistemi di monitoraggio della protezione catodica? Per comprenderlo, procediamo a fare un riassunto della storia, dell’attualità e del futuro del monitoraggio delle condotte, ponendo in particolare l’attenzione su ciò che diamo per scontato e ci sembra normale perché lo vediamo ogni giorno.
In questo articolo e nel prossimo ti parleremo quindi delle modalità di monitoraggio e di come è possibile ottimizzare la trasmissione dei dati.
Con questi contenuti ci rivolgiamo soprattutto ai lettori stranieri, che hanno delle gestioni diverse da quelle che abbiamo in Italia. Ma, in ogni caso, il recap può essere utile anche per noi italiani per vedere se stiamo lavorando al meglio delle nostre possibilità.
Definizione di monitoraggio remoto
La normativaUNI EN ISO 15589-1:2017 propone questa definizione di monitoraggio remoto: «Come minimo, il monitoraggio remoto deve fornire lo stesso livello di informazioni ottenute dagli operatori di protezione catodica sul campo».
Cosa vuol dire questo? Il “minimo” è una misura puntuale rilevata con la stessa frequenza con cui un tecnico può andare in campo a fare la verifica. Basarsi solo su questa norma significa però prendere la cosa un po’ troppo alla lettera: potete infatti immaginare che cosa voglia dire fare una misura puntuale ogni sei mesi, considerando tutto ciò che può accadere nel frattempo.
Nelle norme NACE non esiste una definizione di monitoraggio remoto. Tuttavia, esiste un gruppo di lavoro che ha il compito di redigere la norma MR21551 sul monitoraggio remoto. Quando questa norma verrà redatta, vedrete che c’è qualche richiamo a ciò che facciamo in Italia.
RMU vs Datalogger
Quando ci limitiamo a ciò che la norma richiede, siamo di fronte a una contrapposizione tra ciò che fa un’unità di monitoraggio remoto (RMU), che effettua una misura ogni tanto, e ciò che invece fa un datalogger, che analizza gli effetti delle interferenze con una misura ad alta frequenza.
Normalmente, ci si trova di fronte a un bivio: quale scegliere?
Se scegliamo un’unità di monitoraggio remoto ci limitiamo a misure periodiche con bassi requisiti di trasmissione, rinunciando però a un campionamento ad alta frequenza; se scegliamo un datalogger, avremo alte frequenze di campionamento, una valutazione degli effetti transitori, ma un recupero difficoltoso dei dati che di solito avviene manualmente, in quanto il dispositivo non dispone di un accesso remoto.
Andamento potenziale ON struttura
In questo grafico vengono mostrati quattro andamenti di potenziale su quattro punti misura nell’arco di sei mesi (una misura a settimana).
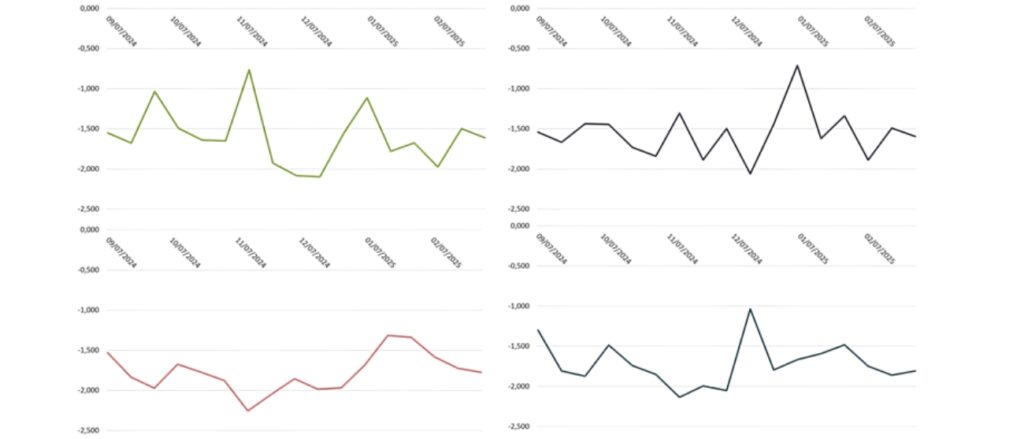
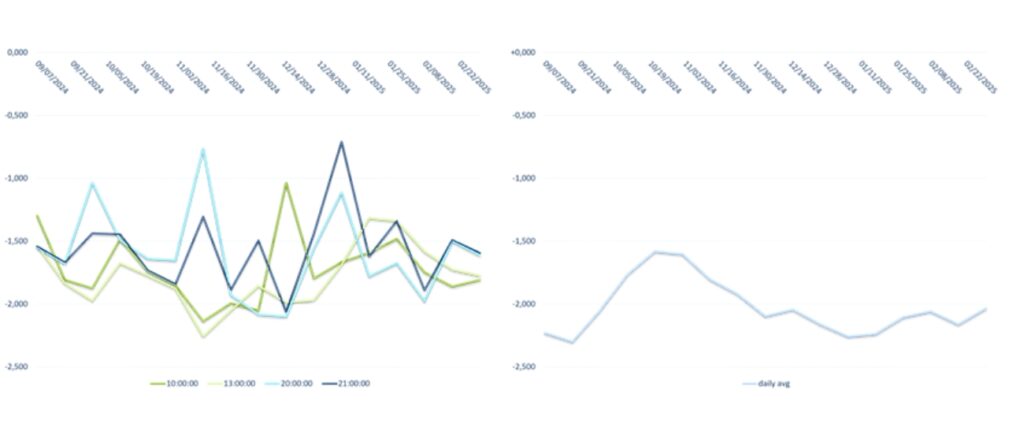
Queste misure sembrano appartenere a sistemi di protezione catodica diversi, in realtà tali curve derivano allo stesso identico punto misura ma sono relative a orari diversi: abbiamo la curva delle 10:00, delle 13:00, delle 20:00 e delle 21:00 (nella figura seguente a sinistra). Pertanto, questo è ciò che ottengo quando effettuo una misura puntuale con una certa periodicità. Mi perdo tutto ciò che accade nel frattempo: non riesco ad avere informazioni chiare sul reale andamento, che è quanto si può vedere nel grafico di destra.
Remote Datalogger Unit ed Edge Computing
Per ovviare a questo problema, serve uno strumento che unisca le caratteristiche di un’unità di monitoraggio remoto (RMU) e di un datalogger: una Remote Datalogger Unit. Si tratta di un dispositivo che non solo ci permette di combinare la comunicazione remota con un monitoraggio ad alta frequenza, ma che è anche intelligente, evidenziando solo gli aspetti chiave dell’informazione (infatti, ci sono dei vincoli in termini di quantità di dati che si possono inviare). L’obiettivo è ottimizzare la trasmissione.
È possibile raggiungere questo scopo attraverso l’edge computing: un modello informatico che elabora le informazioni localmente e invia al Cloud solo i dati essenziali (report giornaliero). Si tratta, dunque, di un dispositivo che, come un datalogger, può effettuare una misura al secondo nel sito dove è collocato. Con questa frequenza di misura, al termine della giornata si otterranno 86.400 misure: essendo una quantità molto elevata, è impensabile inviarle tutte, visto anche che il dispositivo funziona a batteria.
Pertanto, il dispositivo elabora tali informazioni e fornisce un riassunto, indicando:
- Minimo, medio, massimo giornaliero: dove il valore medio è un valore consistente che deriva da una misura al secondo nell’arco della giornata, consentendo di capire il reale andamento (non come nel precedente grafico a sinistra).
- Informazioni statistiche: moda, ovvero il valore più frequente misurato all’interno degli 86.400 campioni; deviazione standard; e variabilità, per avere un’idea di quanto varia la misura durante la giornata.
- Tempo totale (secondi) al di sotto della soglia minima e al di sopra della soglia massima durante il giorno: per avere un range in cui considerare il segnale valido o non valido; in quest’ultimo caso, ci saranno una serie di allarmi o condizioni a cui fare attenzione.
- Numero totale di superamenti della soglia minima durante il giorno.
- Numero totale di superamenti della soglia massima durante il giorno.
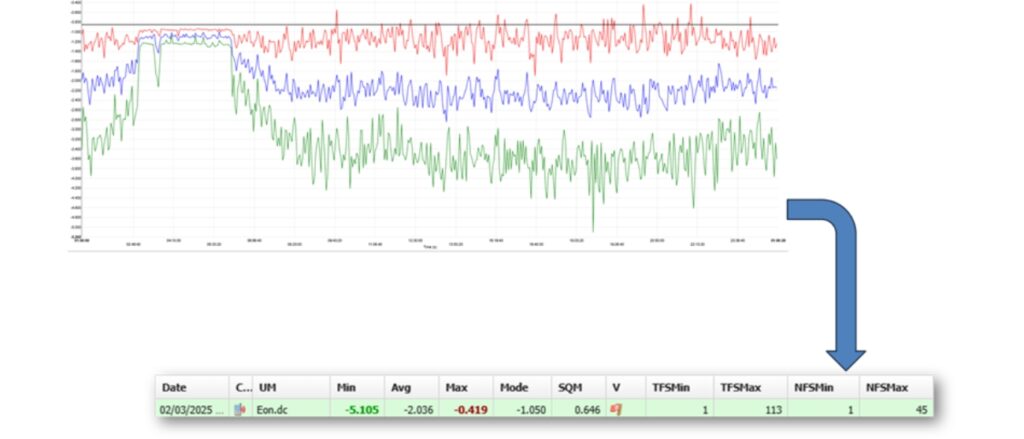
Tutte queste informazioni, che si riassumono in set di numeri (vedi figura sotto), sono contenute in pochi kilobyte di dati al giorno ma raccontano la storia di tutto ciò che è successo nell’arco delle 24 ore, e lo faranno finché il dispositivo sarà installato.

Leggere il report giornaliero
Edge Computing
In figura, vediamo nel dettaglio alcuni valori.
Min, avg, max
Come possiamo trasformare la registrazione di 24 ore di dati in un report giornaliero?
Innanzitutto, abbiamo le seguenti informazioni:
- Valore minimo: il valore più negativo misurato nel corso delle 24 ore.
- Valore medio: dato dalla media aritmetica dei campioni rilevati nel corso delle 24 ore.
- Valore massimo: il valore più positivo misurato nel corso delle 24 ore.
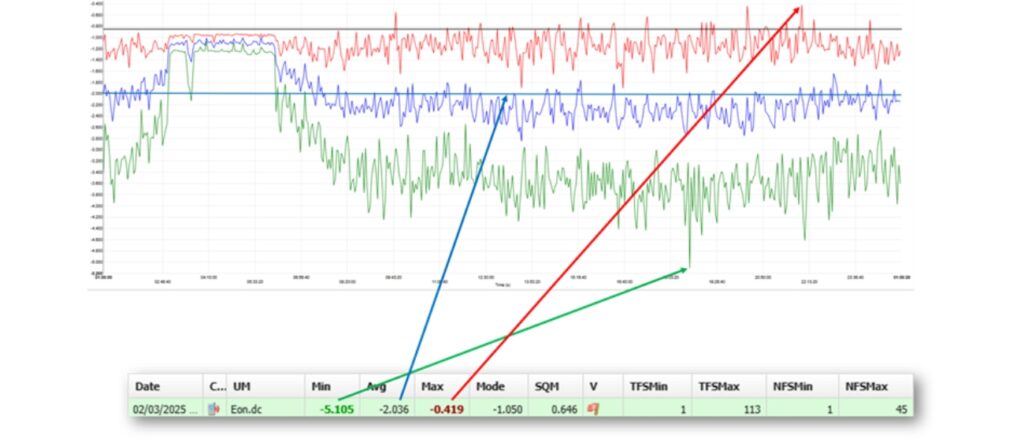
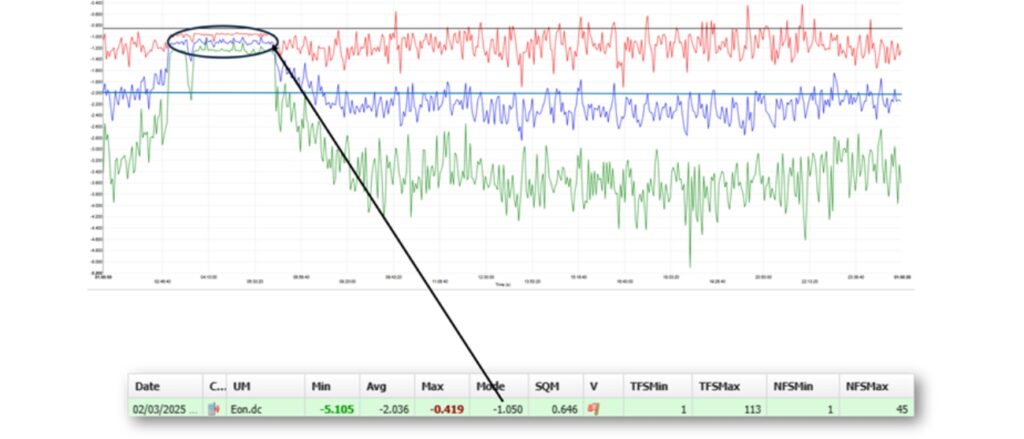
Moda
Aritmeticamente, la moda è il valore più frequente all’interno di un insieme di campioni (86.400 secondi). Di solito, media e moda hanno valori simili, ma quando siamo in presenza di una interferenza non stazionaria, come per esempio in corrispondenza di un attraversamento ferroviario (vedi fig. sotto), la moda assume un significato molto particolare: nelle ore notturne troviamo una fascia di misura leggermente più stabile e, quasi sempre, il valore della moda coincide esattamente col valore nell’orario notturno quando il sistema non è interferito. Infatti, è più probabile che un valore si ripresenti più volte costante all’interno di quell’intervallo. Quindi, anche in una condizione in cui vi è una notevole variabilità, è possibile, da questi pochi numeri, ricavare anche l’informazione su qual è (in assenza di interferenza) il potenziale relativo a quel punto misura.
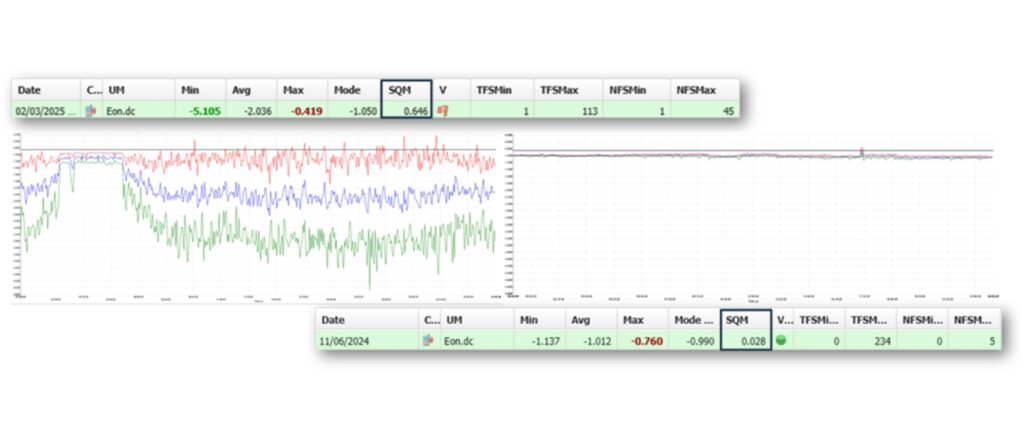
Deviazione standard e variabilità
Osservando la tipologia di tracciato nella figura qui sotto a sinistra, ci aspetteremmo che la deviazione standard (o Scarto Quadratico Medio, SQM) fosse abbastanza elevata. Potrei avere misure con valori di minimo e massimo simili, ma magari dovuti a una singola interferenza che è durata pochi secondi.
Di questo ci si accorge grazie al valore della deviazione standard; infatti, tale valore dice quanto stabile è stata la mia popolazione di campioni nel corso delle 24 ore. Quindi, anche avendo valori di minimo e massimo piuttosto ampi come range, se mi rendo conto di avere uno scarto quadratico medio basso (sotto lo 0,05), so che in realtà, durante quasi tutta la giornata, il mio valore è stato vicino al valore medio.
Tempo e numero di allarmi
Il report giornaliero ci permette anche di sapere per quanto tempo siamo stati fuori dalle condizioni di limite che abbiamo impostato.
Il tempo di fuori soglia minimo e il numero di fuori soglia minimo forniscono una panoramica di quante volte si è andati al di sotto di quel valore: nel caso illustrato nell’immagine sotto, si è raggiunto il fuori soglia minimo una volta per 1 secondo. D’altra parte, il tempo di fuori soglia massimo e il numero di fuori soglia massimo mostrano quante volte si è andati al di sopra di quel valore: nel caso sotto, si è raggiunto un tempo totale di fuori soglia massimo inferiore ai 2 minuti, in quarantacinque intervalli. Questo, tra l’altro, ci permette di avere un’idea del tempo medio di fuori protezione: in questo caso, siamo sui 2,5 secondi.
Perché è fondamentale? Perché facendo una misura continuativa, riesco a sapere tutto ciò che succede ed è sufficiente vedere questo valore per verificare se la struttura è a rischio corrosione. È chiaro che in una condizione di protezione catodica continua, piccoli intervalli fuori dai livelli di protezione non comportano un rischio di corrosione immediato: spetta al tecnico decidere e impostare l’intervallo sopra il quale è necessario essere allertati. In ogni caso, in Italia, la normativa ha stabilito un valore massimo di 3.600 secondi non continuativi.

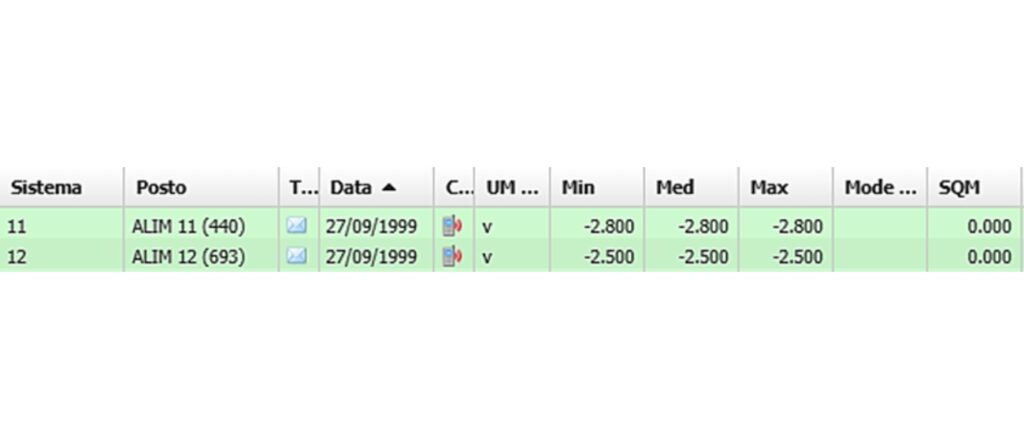
Secondo ChatGPT il termine “edge computing” ha iniziato ad essere conosciuto a partire dal 2014, ma è diventato di uso comune intorno al 2017. È importante notare questo per un semplice motivo: tutto ciò che abbiamo visto fin qui è quello che in Italia viene fatto dal 2001 in quanto richiesto dalla norma UNI 10950 pubblicata quell’anno.
Nella chart qui di seguito viene mostrato il primo report giornaliero ritrovato nel nostro database, che risale al 1999, a dimostrazione del fatto che sono più di 25 anni che facciamo Edge Computing “senza saperlo”.
AUTOMA progetta e produce soluzioni hardware e software innovative e Made in Italy peril monitoraggio e il controllo remoto in ambito Oil, Gas e Water.
Siamo nati nel 1987 in Italia, e oggi oltre 50.000 dispositivi Automa sono installati in più di 40 Paesi nel mondo.
Vuoi conoscere i vantaggi per la sicurezza delle tue reti chepotresti avere con sistema di monitoraggio AUTOMA della protezione catodica?
Contatta il nostro team senza impegno e ti diremocosa possiamo fare per ottimizzare il tuo controllo delle infrastrutture.

 Product Manager presso Automa S.r.l.
Product Manager presso Automa S.r.l.
Ingegnere elettronico, è certificato come Tecnico Senior in protezione catodica e specializzato in analisi di mercato e standard di settore. Con oltre 15 anni di esperienza nel monitoraggio remoto della protezione catodica e un brevetto su un elettrodo di riferimento intelligente, Ivano è membro del Board of Directors del Ceocor (European Committee for the Study of Corrosion and Protection of Piping Systems) e Delegate di AMPP Italy Chapter, nonchè membro attivo dei gruppi di lavoro normativi ISO e AMPP per la protezione catodica.